Microrobot magnetici a nastro di idrogel ed identificazione dei modelli nel sangue delle persone “vaccinate”
Introduzione
Sabato scorso, chi scrive su questo blog ha presentato un rapporto di medici francesi che hanno confrontato il sangue di persone “normali“, quindi “non vaccinate“, con quello di persone a cui è stato iniettato il cosiddetto “vaccino“.
Nel documentario in esame, sono stati presentati gli effetti del “vaccino” Pfizer.
Tuttavia, un’analisi più approfondita ha rivelato che la situazione è simile per tutte le altre case farmaceutiche (Tim Truth, 2021a).
A seguito di un’attenta analisi, i ricercatori che hanno redatto lo studio in questione hanno rilevato delle coincidenze o, perlomeno, l’identificazione di diversi pattern con la nanotecnologia.
Questi pattern potrebbero essere impiegati per la costruzione di dispositivi spintronici con grafene o ossido di grafene, la diffusione di farmaci, l’implementazione di interfacce o sensori per l’attivazione a distanza, o altre applicazioni ancora in fase di studio.
La Figura 1 illustra un filamento ondulato, piegato, con una forma tipo nastro leggermente avvolto.
Fig. 1. Filamento con riflesso metallico al microscopio trovato negli esami del sangue di persone vaccinate. (Tim Truth. 2021a)
In riferimento alla forma in esame, si rimanda al lavoro di (Chen, XZ; Hoop, M. ; Mushtaq, F. ; Siringil, E. ; Hu, C. ; Nelson, BJ ; Pané, S., 2017) per approfondimenti sui nanorobot alimentati magneticamente.
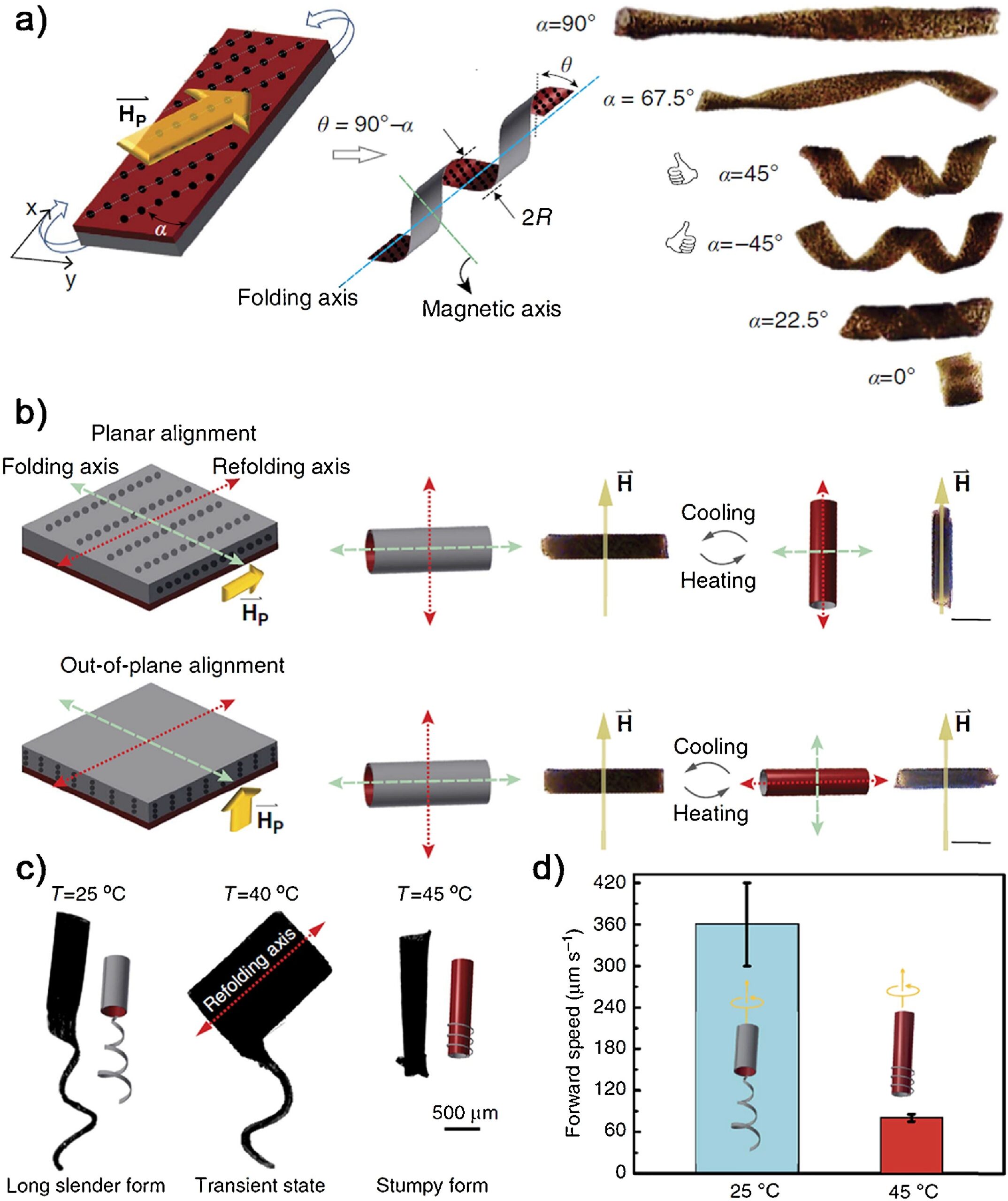
Più precisamente, l’articolo fa riferimento a nanorobot natatori morbidi a forma di nastro, realizzati con idrogel, che rispondono a stimoli esterni, come illustrato nelle figure 2 e 3.
Fig 2 : Nanobot elicoidali controllati da nanoparticelle magnetiche allineate incorporate nell’idrogel. (Chen, XZ; Hoop, M .; Mushtaq, F .; Siringil, E .; Hu, C .; Nelson, BJ; Pané, S. 2017)
Dall’esame della tabella a) della figura 2, si evince che la forma del nanobot è quasi identica a quella mostrata nella figura 1, in particolare nel margine destro.
Un’ulteriore conferma di tale affermazione si ritrova nella tabella c) della figura 2, dove si osserva come lo spessore del nastro può variare in base al disegno del pennacchio del nanobot.
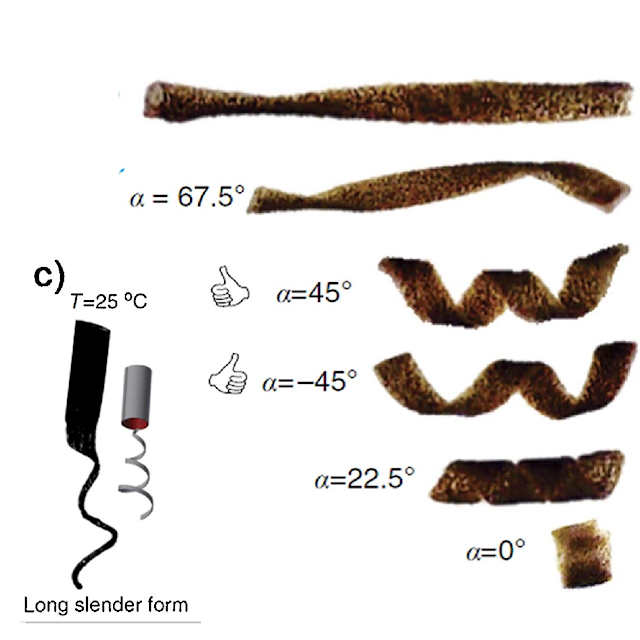
Nella figura 3 si osserva un’espansione dei dettagli della figura 2.
Fig 3. : Ingrandimento dettagliato dei pattern riscontrati nell’articolo, che coincidono con quelli riscontrati nel campione di sangue. (Chen, XZ; Hoop, M .; Mushtaq, F .; Siringil, E .; Hu, C .; Nelson, BJ; Pané, S. 2017)
Secondo i ricercatori del team che ha condotto la ricerca (Chen, XZ; Hoop, M .; Mushtaq, F .; Siringil, E .; Hu, C .; Nelson, BJ; Pané, S. 2017), per poter utilizzare i nanobot in ambito biomedico, è necessario disporre di “materiali morbidi sensibili agli stimoli“, che potrebbero essere causati da un campo elettromagnetico.
Inoltre, si osserva che “l’impiego di tali materiali consente di associare la locomozione e le funzionalità dei robot natanti (o microrobot magnetici a nastro di idrogel) a condizioni ambientali specifiche, come potrebbe essere il fluido a base d’acqua presente nel flusso sanguigno, dove è stato rilevato il pattern matching“.
Inoltre, si cita il lavoro di Huang, HW; Sakar, MS; Petruska, AJ; Pané, S.; Nelson, BJ (2016), nel quale viene descritto un approccio alternativo per la fabbricazione di strutture morbide riconfigurabili, come eliche e teste tubolari con code elicoidali, utilizzando la fotolitografia (vedi figure 2 e 3).
Il ripiegamento di monostrati o doppi strati di idrogel potrebbe essere convenientemente predeterminato allineando le particelle magnetiche durante la sequenza di fabbricazione.
L’allineamento delle nanoparticelle magnetiche ha diretto il ripiegamento delle strutture di idrogel e ha permesso il loro ripiegamento mediante riscaldamento NIR, determinando altresì l’asse di facile magnetizzazione della struttura.
In questa spiegazione, alcuni elementi corrispondono perfettamente alla presenza di ossido di grafene nei cosiddetti “vaccini“.
Le nanoparticelle magnetiche, in grado di dirigere il ripiegamento del nanobot, potrebbero essere composte da ossido di grafene, poiché è l’unico materiale che reagisce al riscaldamento NIR (Near Infrared) o vicino all’infrarosso, come già evidenziato nei seguenti lavori (Khan, MS; Abdelhamid, HN; Wu, HF 2015 | Liu, W.; Zhang, X.; Zhou, L.; Shang, L.; Su, Z. 2019 | Robinson, JT; Tabakman, SM; Liang, Y.; Wang, H.; Sanchez-Casalongue, H.; Vinh, D.; Dai, H. 2011 | Ji, M.; Jiang, N.; Chang, J.; Sun, J. 2014).
Proseguendo con la disamina della pubblicazione di (Chen, XZ; Hoop, M.; Mushtaq, F.; Siringil, E.; Hu, C.; Nelson, BJ; Pané, S.2017) si può fornire un’ulteriore spiegazione riguardante la forma del nanobot e la sua interazione con gli infrarossi : “Sotto l’esposizione al vicino infrarosso (NIR), le micromacchine morbide con una testa tubolare a doppio strato e un flagello elicoidale monostrato potrebbero subire una variazione morfologica, passando da una forma lunga e sottile a una tozza.
La forma allungata e sottile si caratterizza con una testa tubolare a doppio strato con una coda monostrato, mentre la morfologia tozza corrisponde a un tubo piegato con il pennacchio avvolto intorno alla punta della testa. Sebbene entrambe le strutture possano essere impiegate come cavatappi in condizioni di rotazione, la forma lunga e sottile ha dimostrato velocità di avanzamento superiori rispetto alla forma corta e tozza”.
È interessante notare che la forma sottile e allungata è precisamente quella mostrata nella Figura 1.
Inoltre, i ricercatori sottolineano che queste “micromacchine morbide” sono promettenti per specifiche applicazioni di somministrazione di farmaci, il che suggerisce che questo potrebbe essere ciò che è stato osservato nel documentario Tim Truth. 2021a.
Si fa inoltre riferimento al lavoro di (Fusco, S.; Huang, H.W.; Peyer, K.E.; Peters, C.; Häberli, M.; Ulbers, A.; Pané, S. 2015) sui microrobot per applicazioni mediche, in cui specificamente si allude allo sviluppo di tali dispositivi e dei “bistrati di idrogel che cambiano dinamicamente sulle loro prestazioni per la navigazione negli orifizi corporei e la somministrazione di farmaci su richiesta” e, cosa più importante, “i micro-robot tubolari sono realizzati accoppiando un nanocomposito idrogel resistente al calore con uno strato di poli (etilenglicole) diacrilato (PEGDA), per ottenere una piegatura spontanea e reversibile da una struttura rettangolare piatta.
Nanoparticelle di ossido di ferro superparamagnetico (GO) o di ossido di grafene rivestite di silice sono disperse nella matrice di idrogel termosensibile per fornire rispettivamente sensibilità alla luce nel vicino infrarosso (NIR) o attivazione magnetica”.
Questo risultato è in linea con la presenza di ossido di grafene nei vaccini, l’uso di poli (etilenglicole), noto come PEG, per il suo rivestimento, e la attivazione da campi infrarossi ed elettromagnetici (probabilmente le onde elettromagnetiche del 5G, fra le altre).
Infine, si osserva che “questi concetti vengono infine applicati ai microrobot elicoidali per mostrare un possibile modo per ottenere un comportamento autonomo“, che giustifica e garantisce che venga applicato ai microrobot con la forma a nastro elicoidale già nota.
L’articolo illustra in modo esaustivo il processo di fabbricazione dell’ossido di grafene GO utilizzato nei prototipi, nonché i bistrati idrogel e la caratterizzazione delle nanoparticelle magnetiche Fe2O3 (molto vicine alla formulazione Fe3O4).
D’altra parte, è necessario fare riferimento all’esperimento di somministrazione di un farmaco in cui “microtubi sensibili alla luce NIR a base di GO sono stati fabbricati in modo simile al microrobot magnetico.
Successivamente alla completa liofilizzazione, i microtubi sono stati rigonfiati in una soluzione di colorante verde brillante (BG), al fine di simulare un processo di caricamento del farmaco idrofilo.
La luce NIR è stata impiegata per indurre, a distanza, il collasso della matrice o la variazione di forma, e sono stati registrati e confrontati gli effetti sulla cinetica di rilascio per entrambi i sistemi“.
Oltre alla prova del rilascio o della consegna del farmaco, il processo di piegatura del nastro è stato anche studiato con un intervallo di temperatura tra 20° e 45° che sarebbe compatibile con la temperatura del corpo umano.
In base alla temperatura, il nastro di idrogel subisce variazioni di piegatura, come illustrato nella figura 4.
Fig. 4 : Piegatura dipendente dalla temperatura di un nastro magnetico in idrogel. (Fusco, S .; Huang, HW; Peyer, KE; Peters, C .; Häberli, M .; Ulbers, A .; Pané, S. 2015)
Riflessioni finali
Sembra essere stata individuata un’importante concomitanza nel modello osservato nel sangue delle persone vaccinate, come riportato in (Tim Truth. 2021a) con i micro-robot magnetici a nastro idrogel (Chen, XZ; Hoop, M. Mushtaq, F. Siringil, E. Hu, C. & Pané, S. (2017); Fusco, S., Huang, H.W., Peyer, K.E., Peters, C., Häberli, M., Ulbers, A. & Pané, S. (2015); Huang, H.W., Sakar, M.S., Petruska, A.J., Pané, S. & Nelson, B.J. (2016).
Il test in questione consente di dedurre che i cosiddetti “vaccini” somministrati potrebbero contenere, con elevata probabilità, questo tipo di nanotecnologia.
I robot di nuoto (o microrobot magnetici a nastro di idrogel) integrano tutte le caratteristiche conosciute dell’ossido di grafene, del magnetismo e degli infrarossi per la loro attivazione, controllo e guida, nei fluidi corporei umani, in particolare nel flusso sanguigno.
Oltre alla capacità di muoversi autonomamente e di modificare la propria forma in risposta alla temperatura, questi dispositivi possono essere impiegati per la somministrazione automatica di farmaci.
Pertanto, non sarebbe sorprendente che l’aumento della temperatura corporea, come reazione all’inoculazione del vaccino, provochi l’attivazione e il rilascio dei farmaci che potrebbero potenzialmente veicolare.
Tuttavia, è anche possibile che questi meccanismi possano essere attivati in modalità wireless da onde elettromagnetiche, il che permetterebbe a tali dispositivi di essere indirizzati verso potenziali obiettivi presenti nel corpo umano.
Nonostante l’idrogel di PEGDA del robot di nuoto (o microrobot magnetici a nastro di idrogel) eviti i ben noti problemi di citotossicità con l’ossido di grafene, ciò accade solo per un periodo di tempo limitato (12 settimane), fino a quando non si sfalda (Browning, MB; Cereceres, SN; Luong, PT; Cosgriff-Hernandez, EM 2014) entrando in contatto con il sangue e le cellule del corpo.
In condizioni di normalità, la durata media è di 5 giorni.
Tale dato potrebbe fornire indizi utili per l’identificazione di casi di tossicità post-vaccinale.
Bibliografia
1.Browning, MB; Cereceres, SN; Luong, PT; Cosgriff – Hernandez, EM (2014). Determination of the in vivo degradation mechanism of PEGDA hydrogels. Journal of Biomedical Materials Research Part A, 102 (12), pp. 4244-4251. https://doi.org/10.1002/jbm.a.35096
2.Chen, XZ; Hoop, M.; Mushtaq, F.; Siringil, E.; Hu, C.; Nelson, BJ; Pané, S. (2017). Recent developments in magnetically driven micro-and nanorobots, 9, pp. 37-48. https://doi.org/10.1016/j.apmt.2017.04.006
3.Fusco, S.; Huang, HW; Peyer, KE; Peters, C.; Haberli, M.; Ulbers, A.; Pané, S. (2015). Shape-switching microrobots for medical applications: The influence of shape in drug delivery and locomotion. ACS applied materials & interface 7 (12), pp. 6803-6811. https://doi.org/10.1021/acsami.5b00181
4.Huang, HW; Sakar, MS; Petruska, AJ; Pane, S.; Nelson, BJ (2016). Soft micromachines with programmable motility and morphology. Nature communications, 7 (1), pp. 1-10. https://doi.org/10.1038/nmms12263
5.Ji, M.; Jiang, N.; Chang, J.; Sun, J. (2014). Near‐infrared light‐driven, highly efficient bilayer actuators based on polydopamine‐modified reduced graphene oxide. Advanced Functional Materials, 24 (34), pp. 5412-5419. https://doi.org/10.1002/adfm.201401011
6.Khan, MS; Abdelhamid, HN; Wu, HF (2015). Near infrared (NIR) laser mediated surface activation of graphene oxide nanoflakes for efficient antibacterial, antifungal and wound healing treatment. Colloids and Surfaces B: Biointerfaces, 127, pp. 281-291. https://doi.org/10.1016/j.colsurfb.2014.12.0497
7.Liu, W.; Zhang, X.; Zhou, L.; Shangai, L.; Su, Z. (2019). Reduced graphene oxide (rGO) hybridized hydrogel as a near-infrared (NIR)/pH dual-responsive platform for combined chemo-photothermal therapy. Journal of colloid and interface science, 536, pp. 160-170. https://doi.org/10.1016/j.jcis.2018.10.050
8.Robinson, JT; Tabakman, SM; Liang, Y.; Wang, H.; Sanchez-Casalongue, H.; Vinh, D.; Dai, H. (2011). Ultrasmall reduced graphene oxide with high near-infrared absorbance for photothermal therapy. Journal of the American Chemical Society, 133 (17), pp. 6825-6831. https://doi.org/10.1021/ja2010175




")


")







